交運(yùn)大新社 文/圖 劉柔燁
為拓寬學(xué)生的學(xué)術(shù)視野,提高學(xué)生的科研能力及學(xué)術(shù)水平,加深學(xué)生對(duì)交通行業(yè)的理解,12月7日,交通運(yùn)輸學(xué)院王嵩博士以“分心駕駛機(jī)制建模及其在自動(dòng)駕駛環(huán)境中對(duì)安全的影響”為主題面向交通運(yùn)輸學(xué)院全體學(xué)生開(kāi)展了“雙福·行遠(yuǎn)”學(xué)術(shù)講座。
王嵩博士畢業(yè)于美國(guó)路易斯維爾大學(xué),主要研究方向是車(chē)聯(lián)網(wǎng)與自動(dòng)駕駛、交通安全、人機(jī)交互與人因、交通政策規(guī)劃。近年來(lái),王博士主要參與KYTC、NSF等研究項(xiàng)目,其研究成果被寫(xiě)入“Vehicular Communication”維基百科中。
講座開(kāi)始,王博士通過(guò)自動(dòng)駕駛的定義以及自動(dòng)駕駛的五種等級(jí)分類(lèi)和操作機(jī)制,結(jié)合交通事故舉例,提出人機(jī)交互是解決自動(dòng)駕駛環(huán)境中分心駕駛的重要手段。王博士提出,基于目前自動(dòng)駕駛研究情況,分心駕駛機(jī)制在自動(dòng)化駕駛環(huán)境的研究中存在五個(gè)研究空白:非自動(dòng)駕駛狀態(tài)下的分心駕駛程度量化、自動(dòng)駕駛狀態(tài)下的分心駕駛程度量化、自動(dòng)駕駛狀態(tài)下的分心駕駛程度預(yù)測(cè)、自動(dòng)駕駛狀態(tài)下分心程度對(duì)交通安全的影響、關(guān)于分心駕駛程度對(duì)交通安全的影響的解決措施。

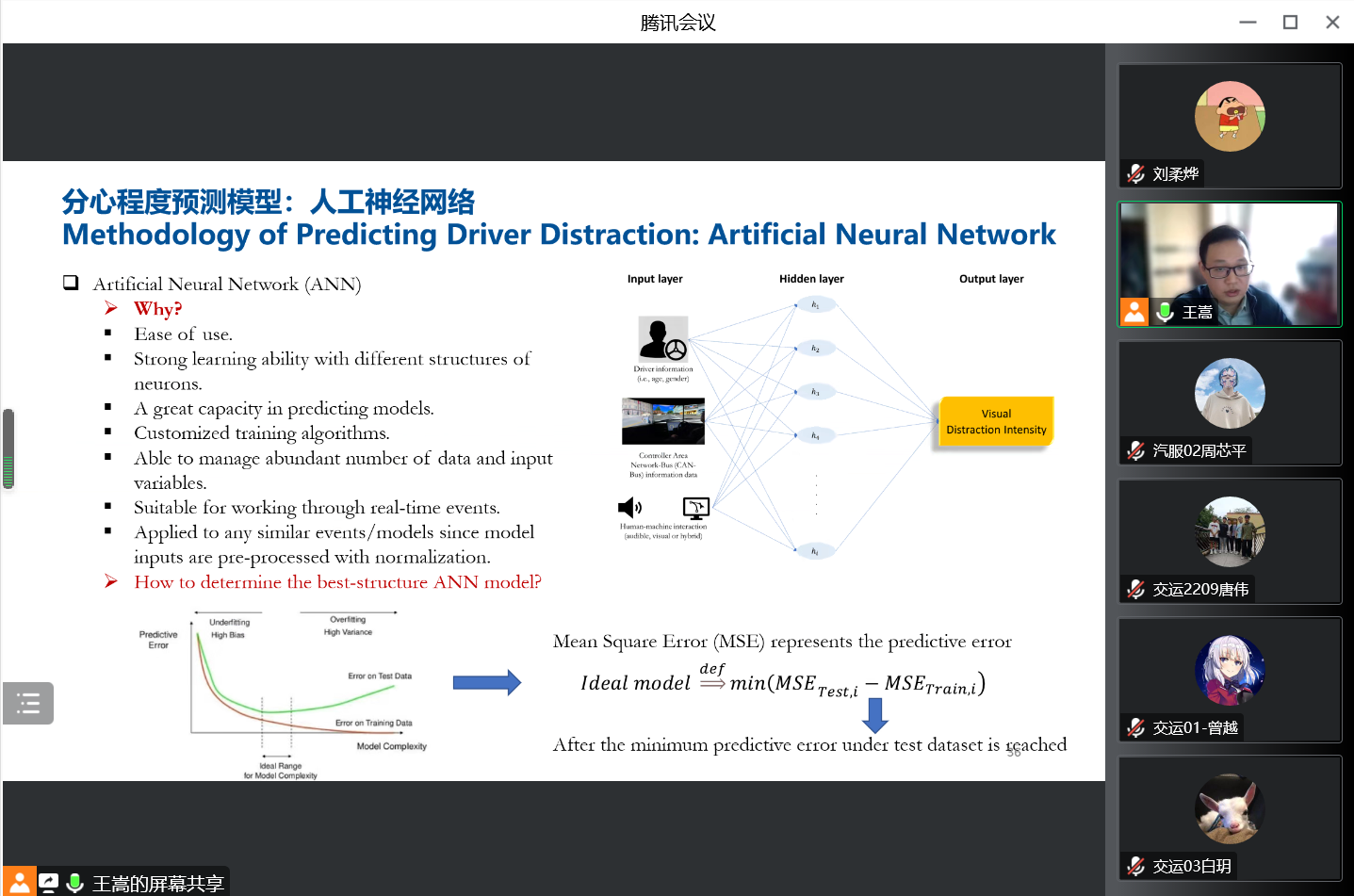
隨后,王博士希望改進(jìn)現(xiàn)有條件下駕駛員分心程度量化方法,開(kāi)發(fā)傳感器分心預(yù)測(cè)模型,進(jìn)而定量揭示人機(jī)交互誘導(dǎo)的視覺(jué)和認(rèn)知干擾在自動(dòng)駕駛下危險(xiǎn)事故的動(dòng)態(tài)性質(zhì),建立以預(yù)測(cè)為導(dǎo)向的防撞系統(tǒng)。王博士提到視覺(jué)分心程度的建模和認(rèn)知分心程度的建模,從兩種不同的維度進(jìn)行分析量化,打破大眾對(duì)分心程度的一維認(rèn)知,這也為人機(jī)交互研究設(shè)備的發(fā)展指明了新方向。
講座最后,王博士提到未來(lái)自動(dòng)駕駛發(fā)展前途大好,需要關(guān)注自動(dòng)駕駛的安全性,并且希望相關(guān)系統(tǒng)未來(lái)可以更好地被優(yōu)化,早日落地,減輕分心駕駛帶來(lái)的安全隱患,減少交通事故的發(fā)生。
講座結(jié)束以后,同學(xué)們就駕駛員分心程度的接管策略、分心預(yù)警提醒設(shè)備和研究設(shè)備產(chǎn)品化等問(wèn)題向王博士提問(wèn),王博士從專(zhuān)業(yè)角度給予了分析和解答。通過(guò)這次講座,同學(xué)們受益匪淺,從多維度了解自動(dòng)駕駛以及分心程度機(jī)制建模,對(duì)啟發(fā)專(zhuān)業(yè)性、創(chuàng)新性思維有很大幫助。
